
|
Ziyu Chen
Ph.D. Student in Computer Science
Email: ziyuchen@stanford.edu |
I am a CS Ph.D. student at Stanford, advised by Jiajun Wu. I'm working on visual generative models. My research is generously supported by the Stanford Graduate Fellowship and Qualcomm Innovation Fellowship.
Previously, I worked with Prof. Yue Wang at USC and collaborated closely with Prof. Marco Pavone. I received my M.S. and B.S. degrees from Shanghai Jiao Tong University.
|
|
|
OCT
2024
Talk at MIT Visual Computing Seminar, visited beautiful Boston!
SEP
2024
Invited talk at LiAuto on urban scene reconstruction.
|
|
◆ equal contribution · ◇ equal advising · full list |
|
|
arXiv 2026 RealWonder turns a single image into an interactive scene using a controllable video model. By incorporating physics, it enables physically grounded 3D interactions. |
|
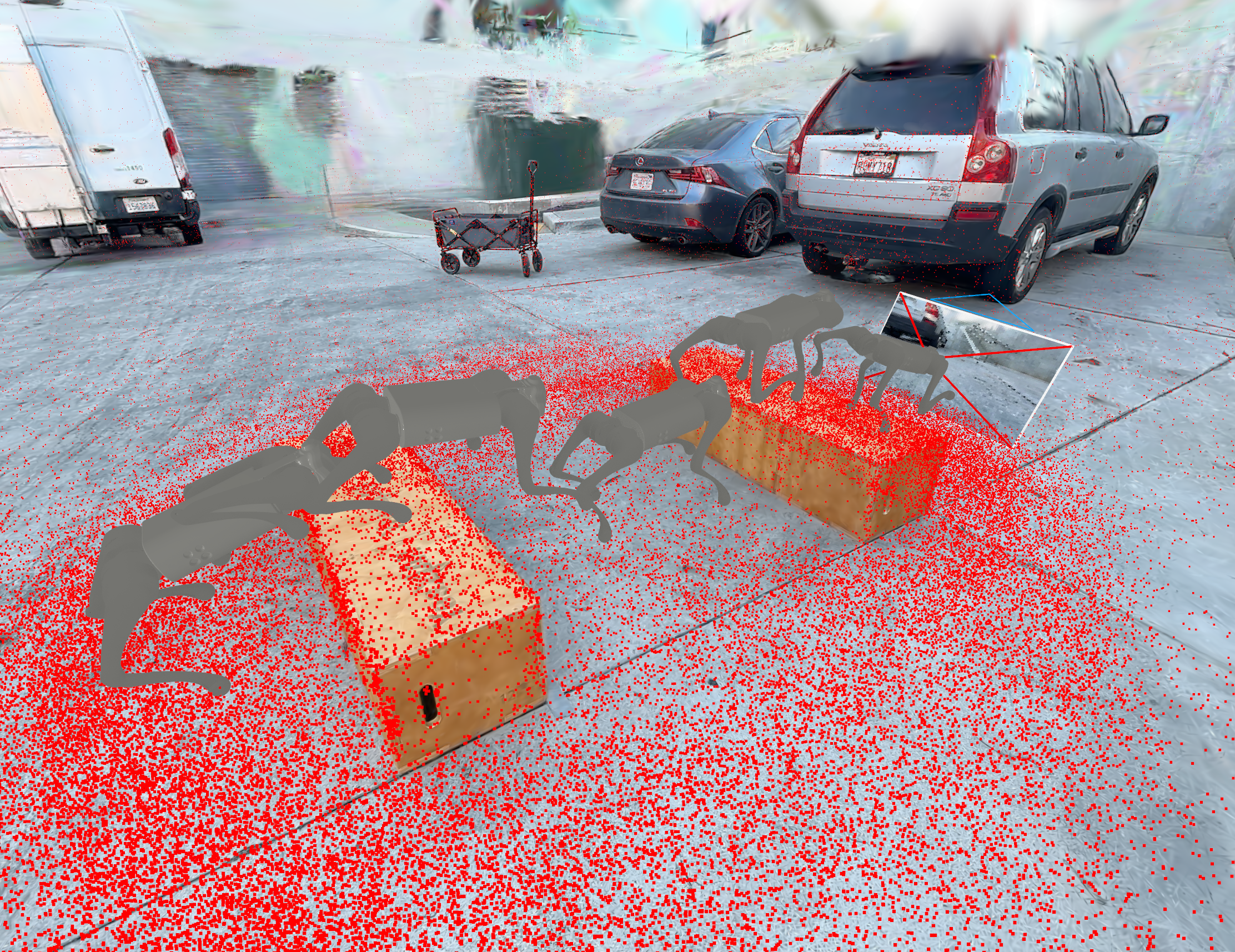
IROS 2026 A toolchain and benchmark suite for hyper-realistic visual locomotion, building high-fidelity digital twins of real-world environments for closed-loop evaluation. |
|
|
ICLR 2025 (Spotlight) OmniRe is a holistic framework for dynamic scene reconstruction that provides comprehensive coverage, including static backgrounds, driving vehicles, and non-rigidly moving dynamic actors. |
|
|
ACM Multimedia 2023 We proposed a diffusion-based pipeline that generates complete 360 panoramas using one or more unregistered NFoV images captured from arbitrary angles. This pipeline not only delivers superior quality panoramas but also offers a broader range of outcomes due to its text-conditioned generation capability. |

|
ECCV 2022 Our L-Tracing based reflectance factorization framework produces photo-realistic novel view images with nearly 10x speedup, compared with the same framework applying volumetric integration for light visibility estimation. |
|
|
|
|

A 3DGS codebase for dynamic urban scene reconstruction and simulation, featuring different Gaussian representations for rigid actors (vehicles) and non-rigid actors (pedestrians, cyclists, etc.). Supported datasets include Waymo, PandaSet, ArgoVerse2, KITTI, NuScenes, NuPlan. |

|
|
|
Stanford University Ph.D. in Computer Science Sep 2025 - PresentStanford, CA Shanghai Jiao Tong University M.S. in Electrical Engineering Sep 2022 - Mar 2025 B.S. in Electrical Engineering Sep 2018 - Jun 2022Shanghai, China |
|
|
|
Qualcomm Innovation Fellowship, 2026 Stanford Graduate Fellowship, Stanford, 2025 National Scholarship, Shanghai Jiao Tong University, 2023 Zhiyuan Honor Fellowship, Shanghai Jiao Tong University, 2018-2022 |
© Ziyu Chen